貴社の設計にアブソリュート・エンコーダーが最適となるのはどんな時ですか?
速度、動作方向または回転シャフト位置の測定が必要な場合は、おそらく回転エンコーダーが必要になるでしょう。この中から一つ選ぶとすれば、二つの主なタイプが考えられます。インクリメント・エンコーダーとアブソリュート・エンコーダーです。
お客様に正しい選択をしていただけるよう、当社はアブソリュート・エンコーダーのショートガイドを作成いたしました。アブソリュート・エンコーダーとは何か、インクリメント・エンコーダーとの違いは何か、どのような場合に必要になるのかを理解するためにぜひお役立てください。
アブソリュート・エンコーダーとは何ですか?
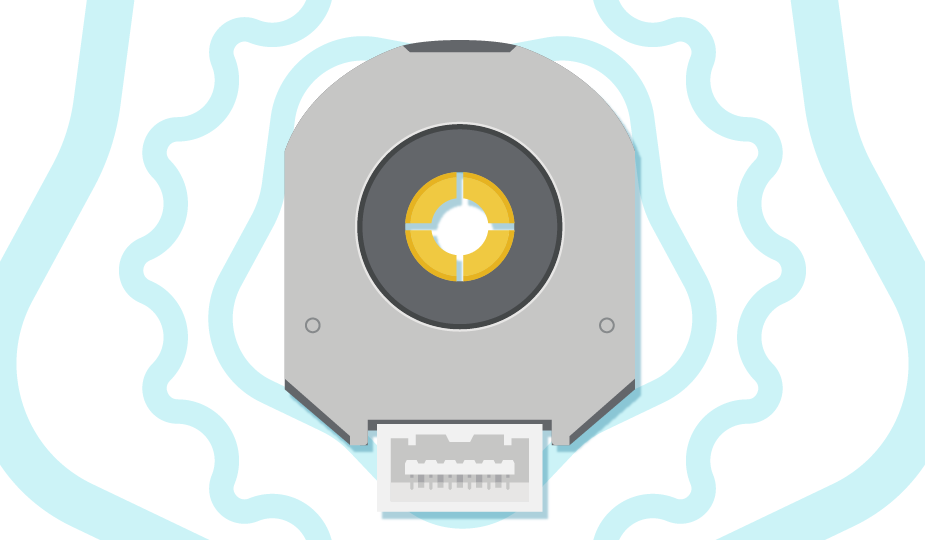
アブソリュート・エンコーダーは、回転の各ポイントで、エンコーダーの「絶対」位置を示す特異な位置情報やデータワードを提供します。アブソリュート・エンコーダーは、電源を入れた時点から、測定する回転シャフトの正確な位置を知らせることができます。光学、磁気、または静電容量センサーを使用して、シャフトと回転する1枚のディスクの特異コードを読み取ることでこれを行います。極めて重要なのは、アブソリュート・エンコーダーはこれをシャフトを回転させずに行えるため、例えば電源が失われた場合でもこの位置データを追跡することができます。特異コードがエンコーダーのディスク上により多くあるほど、位置の読み出しはより正確になります。

分解能は、1回転での特異データ数に対応するビット(2進数)で表示されます。アブソリュート・エンコーダーは、シングルターンとマルチターンがあります。シングルターン・エンコーダーは、1回転、360°分の位置データを提供し、シャフトが旋回するごとに出力を繰り返します。マルチターン・エンコーダーはも1回転の位置データを提供しますが、複数回転の数値を測定する追加の「回転」カウンターを持ちます。
アブソリュート・エンコーダー vs インクリメント・エンコーダー
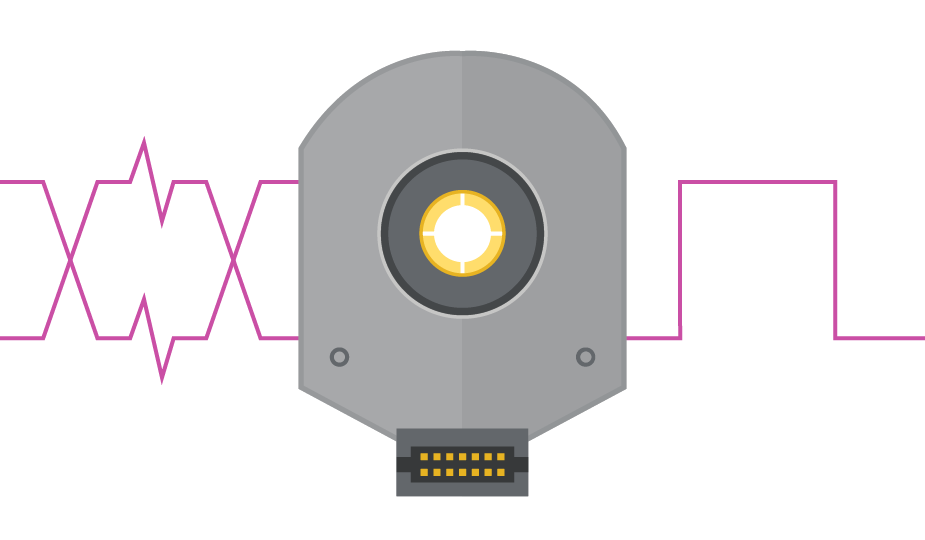
逆に言えば、インクリメント・エンコーダーはシャフトの回転と共にパルスを生成することで動作します。典型的なインクリメント・エンコーダーは、2 四角波 90 度の相差ができます。これらのパルスは、エンコーダー外部にある電子機器で追跡または算出する必要があります。

分解能は1回転ごとのパルス数であるPPRで表され、インクリメント・エンコーダーがその四角波出力のいずれかから得られる高パルスの数を表します。エンコーダーのPPRについての詳細情報は、トピックのブログ記事をご覧ください。
インクリメント・エンコーダーの出力は4のリピート状態のうちの1つにすぎないので、このエンコーダーは既知の位置か、「ホーム」でその重要な位置情報を提供して参照する必要があります。しばしばエンコーダーのインデックスパルスでアライメントされるホーム位置から、シャフト回転のインクリメント変化が追跡され、シャフトの絶対位置がわかります。これは、インクリメント・エンコーダーを切り替える毎、または一時的に電源が失われた際に行なう必要があります。結果として、絶対位置の読み出しをおこなうにはより長い時間がかかります。そしてそれを得るためにシャフトを回転しなければなりません。
インクリメント・エンコーダーはアブソリュートモデルと比べると複雑性は減りますが、そのため通常価格もより安価になっています(価格差は狭まってきていますが)。速度、動作方向、または相対位置のみの測定であれば、インクリメント・エンコーダーが最適な選択と言えますが、絶対位置が必要な場合は、アブソリュート・エンコーダーが適しています。
インクリメント・エンコーダーではなく、アブソリュート・エンコーダーを選択する理由
まず、アブソリュート・エンコーダーはシャフト位置が維持されているため、電源を入れると同時にその位置が確認されます。ホーム位置の確認や校正が終わるのを待つ必要もなく、起動や電源喪失の後、シャフトが開店したままの状態で止まっていても、すぐに位置データを取得することができます。
多くのシステムでは、起動後の絶対位置が重要であることから、ある位置ではシャフトを、一方向にだけ(逆方向ではなく)回転し続けることが安全になります。アプリケーションによっては、これが間違っていると機器の損傷や人体の負傷、時にはそれ以上のことを生じさせる可能性があります。このような状況では、他の部品が動き出す前に、回転デバイスの正確な位置を知ることが必須です。
同じように重要なことは、アブソリュート・エンコーダーはリアルタイムで実際の位置を知らせることができます。システムがセントラル・コミュニケーション・バスで接続されデジタル化が進むにつれ、必要な時や必要に応じて、リアルタイムの位置計測用にエンコーダーを最低レイテンシーでポーリングできるということは、非常に大きなメリットがあります。インクリメント・エンコーダーで位置情報を追跡することは、ホーム位置へ戻るシーケンスを終えたとしても、外部回路ですべてのパルスを追跡する必要があります(通常、直角位相デコーディングを介して)。外部回路の必要性に加え、これは位置情報の決定にはレイテンシーがいくつか含まれるということも意味します。

他にもメリットはあります。アブソリュート・エンコーダーを実装するシステムは、バイナリーエンコーダーから既にエラーがチェックされているコードを読み取るか、シリアルバス上でデジタル的に位置情報を獲得するので、パルスをカウントするインクリメント・エンコーダーと比べて、電気的なノイズに対して比較的感度が低くなります。
これと関連して、アブソリュート・エンコーダーは、ファクトリー・オートメーションや複数の接続部を持つロボットアームなどの同一システム上に1台以上のアブソリュート・エンコーダーを組み合わせる事も比較的簡単におこなえるというのも事実です。インクリメント・エンコーダーを使用して複数台の機器から出力をモニタリングすることは、データ処理に甚大な労力が必要となり、非常に複雑になってしまう可能性があります。複数のアブソリュート・エンコーダー、特にセントラル・コミュニケーション・バスと接続することができるタイプを使用すれば、かなり少ない処理労力で読み出しデータの解析を実行してそれぞれから別々にデータを取得することができます。
アブソリュート・エンコーダーのアプリケーション
アブソリュート・エンコーダーとインクリメント・エンコーダーの主な違いを並べましたが、今度はアブソリュート・エンコーダーが使用されるケースを具体的にいくつか見ていきましょう。
主要なマーケットはロボットです。これは様々な分野で急速に拡大しつつあります。製造現場では、ロボットアームを使用して組み立て、溶接、スプレーペイントやその他の作業が行なわれています。また、ヘルスケア分野でもロボットアームが使われています。遠隔手術では、例えば、ロボットアームからの膨大な極めて精密な位置情報が必要です。アブソリュート・エンコーダーを使用するユースケースで、注目を浴びつつあるもう一つの分野は在宅支援です。
ただし、これはほんの一分野にすぎません。より多くのシステムがデジタル化し、インクリメント・エンコーダーとアブソリュート・エンコーダーの価格差が縮まれば、アブソリュート・エンコーダーのアプリケーションは、産業分野と消費者市場で無限に広がっていきます。自動ゲートやカメラジンバルからファクトリー・オートメーションまで、アブソリュート・エンコーダー位置決定の方法として非常に効率的で価格的にも安価と言えます。
アブソリュート・エンコーダーの様々なオプション
製品に対して正しい種類のエンコーダーを選択することはとても重要です。そのためにはインクリメンタル・エンコーダーとアブソリュート・エンコーダーの主要な違いを理解することが欠かせません。価格差の縮小やテクノロジーの変化と共に、アブソリュート・エンコーダーは同等のインクリメント・エンコーダーに対して多くの個別のメリットを持つようになり、位置情報のフィードバック要件に対応する魅力的なオプションとなっています。
 タグ:
タグ:
その他のリソース