回転エンコーダーの改良により、モバイルロボットの省電力化
商用モバイルロボットは、機器やサービスでの広大なマーケットを生み出す可能性を秘めています。近年の研究によると、空中ドローンの機会だけで$50億以上2030以上に飛躍することが期待されています。地上では、人間よりも迅速かつ費用対効果の高い作業をするモバイルロボットが、工業、商業、国内向けなど、さまざまな状況で利用されています。人間には不適切な環境での作業や、反復作業あるいは物理的に要求の厳しい作業を担うことで作業者を解放して、コラボレーション的な役割を果たしています。
移動にはバッテリー駆動が必要です、その結果、動作範囲を最大化するために、車両全体でのエネルギー効率が重要な関心事となっています。ロボットの長時間作業やフル稼働での長距離移動を可能にするためには、限られた電力予算を慎重に管理することが不可欠です。これは、食糧援助を提供するためにできる限り長距離の移動を求められるドローン、オペレーターの収益を向上させるため最大限の稼働時間を提供しなければならない倉庫のアシスタント、あるいは充電1回あたりの作業量が市場での需要に直結する掃除機や芝刈機などの家庭用ロボットなど、あらゆる種類のロボットに当てはまる事実です。また、効率が高まることで、ロボットはより小型のバッテリーを搭載させることで、設計者はコスト、サイズ、重量を管理する上での自由度が生まれます。
コントローラーがモーターのベクトル制御アルゴリズムを実行するために必要な位置情報をキャプチャするために使用する、エンコーダーの選択は、システムのエネルギー効率に重要な影響を与えかねます。マルチモーターシステムでは、効率的なエンコーダーを選択することで実現できるエネルギーの節約は、電力予算にかなりのプラスの影響を与えることができます。今日利用可能なエンコーダー技術の中でも静電容量式エンコーダーは、効率を高めるだけでなく、信頼性の向上、メンテナンスの削減、開発コストの削減、市場投入までの時間の短縮も実現します。この記事では、最も一般的なエンコーダー技術と、成長する自律型モバイルロボット市場での役割について詳しく説明します。
拡大する自律型モバイルロボットのアプリケーション
最近まで、自律型ロボットと空中ドローンは、大企業や軍隊などの政府機関が独占的に開発してきました。しかし今では、技術がより手頃な価格になり、低コストの商用アプリケーションが市場に登場しています。自律型モバイルロボット(AMR)の最大の成長市場は以下の通りですが、これらに限定はされません。
- 物流と倉庫AMRは、マッピングやスケジューリングのアルゴリズムを使用して商品を輸送します
- 産業用モバイルロボットは、スマート工場の材料の取り扱いと生産プロセスを支援します
- 自律型フォークリフトとカートは、パレット移動のための自動化倉庫で使用されています
- 検査および監視ロボットは、施設の監視、セキュリティ、危険な環境の検査に配備されています
- 医療およびサービスロボットは、薬剤の配送または消毒作業のために病院で使用されています
- 自律型農業ロボットは、AI主導の意思決定を使用して植え付け、除草、収穫を行います
- 自動運転車とドローンには、さまざまな商用アプリケーション向けの配送ロボット、自動運転車、UAVなどがあります。
小さな節約で違いをもたらすエンコーダーオプションの比較
飛行範囲や動作時間の根本的な改善には、オンボードのサブシステム全体にわたって細かいエネルギー節約が必要となります。多くの場合、移動ロボットは、カメラ・ジンバルのようなアクチュエータまたは配置メカニズムを作動させるためのいくつかの電気モーターを備えており、モータコントローラ効率がわずかに向上しただけでも、全体的な利得を大幅に改善することができます。モーターの制御と整流は、ローターの角変位を常時把握することに大きく依存しています。光学エンコーダーと磁気エンコーダーは、このタスクを達成するための2つの一般的な選択肢ですが、それぞれに欠点があります。
光学エンコーダーと磁気エンコーダー
光学エンコーダーは、モーターシャフトに取り付けられたコードホイールを通して透過するか、コードホイールから反射する光を検出するLED光源と光学センサーとの組み合わせで構成されています。直交で配置された2つのLEDにより、モータ速度と方向の両方を検出できます。3番目のLEDは、コードホイール上の単一のマーキングを監視し、モータ制御システムにインデックスパルスを提供するために使用できます。
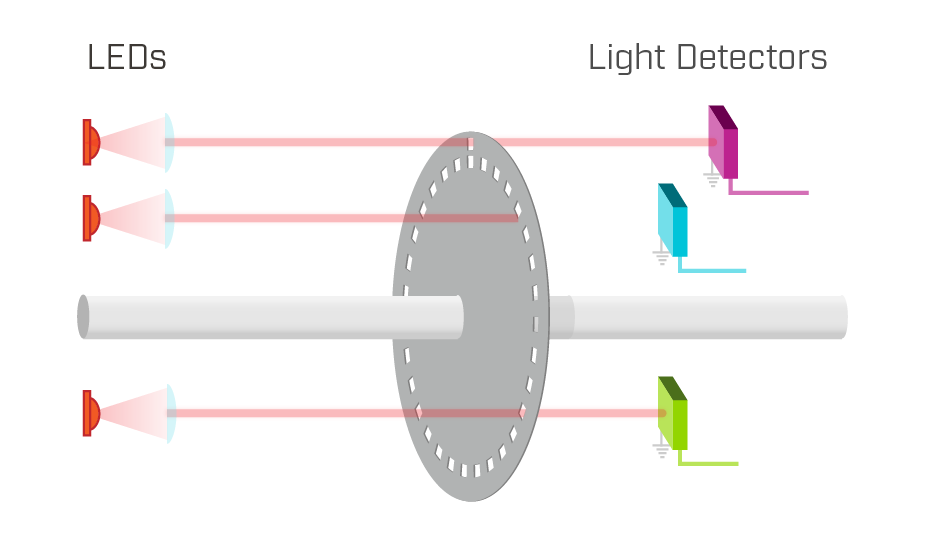
エンコーダーの分解能は、パルス/回転(PPR)の点で、コードホイール上の精密間隔マーキングの数に依存します。光学エンコーダーは非常に高解像度ですが、いくつかの弱点もあります。その弱点には、コードホイールに蓄積し、読み取りミスや誤読を引き起こす可能性がある、ほこり、グリース、または結露に対する脆弱性があります。さらに、LEDの輝度は時間の経過とともに低下し、最終的にはバーンアウトし、エンコーダーの交換を強いられる問題につながります。
エネルギー効率に関しては、光学エンコーダーは比較的高い電流を消費します。これはより高い分解能設定、より複雑な出力信号フォーマットでさらに増加します。実際、最低解像度から最高解像度になると、電流消費は2倍以上になり得ます。一部のエンコーダーは、最高分解能で最大85mAの電流を消費してしまいます。これは、モータが消費する電力と比べると重要ではないように聞こえるかもしれませんが、5Vと85mAでは、エンコーダーは0.425ワットを消費します。4モーターシステムでは、エンコーダーだけで1.7ワットの電力が必要です。バッテリーのエネルギーの消耗を削減することで、そのアプリケーションでは、オンボードカメラ、センサー、小型アクチュエータなどその他のシステムをかなりの時間稼働させることができます。
磁気エンコーダーは、見通し線を必要としない代替手段を提供し、したがって、汚れによるエラーの影響を受けません。さらに、磁気エンコーダーは、ギアオイルなどの非導電性の液体に浸しても動作することができます。一方、位置分解能と精度は通常、光学エンコーダーと比較して低くなります。磁気エンコーダーのタイプに応じて、最大電流は20mA~160mA以上の範囲になります。
容量性ベースの回転エンコーダーにより消費電力を削減
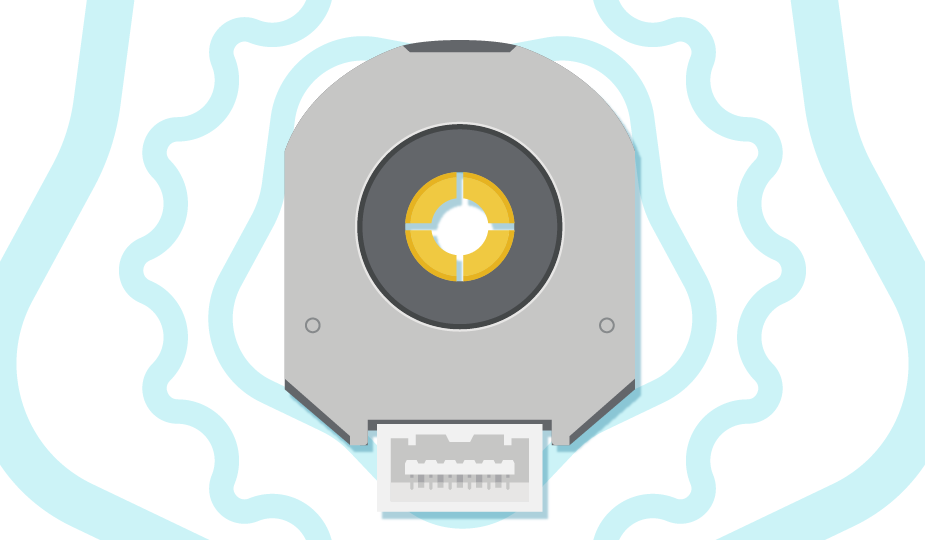
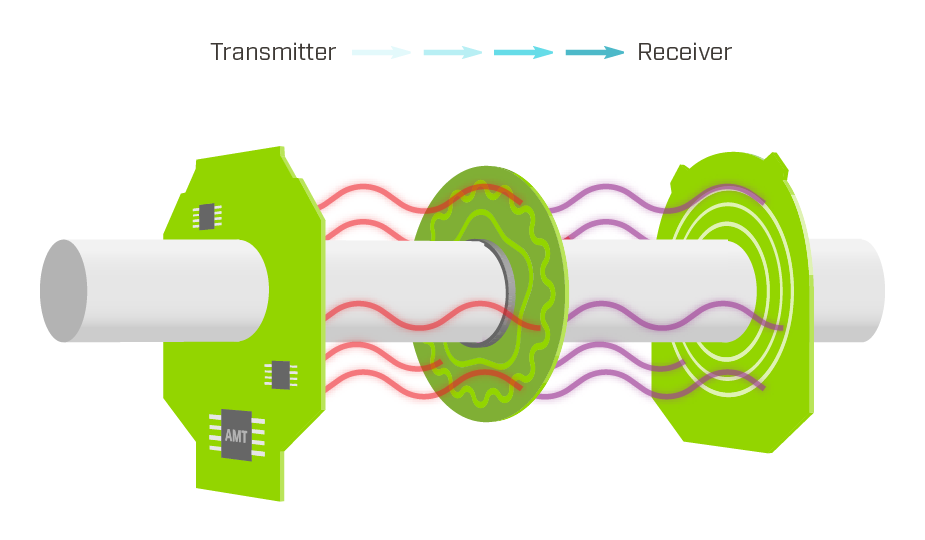
静電容量技術に基づくSame SkyのAMT回転エンコーダーは、もう一つの電力効率に優れた製品です。デジタル式ノギスと同じ動作原理を採用したセンサーは、可変コンデンサを形成する固定本体と1つの可動要素から構成されています。エンコーダーが回転すると、このコンデンサは、シャフトの位置と回転の方向を計算するために使われる独自の予測可能な信号を生成します。オンボード・プロセッサーの助けを借りて、ASICとマイクロプロセッサは一緒に使い、ブラシレスDC(BLDC)モーターに必要な整流パルスやアブソリュート・エンコーダーのシリアル出力など、より複雑な出力を生成できます。
静電容量の動作原理により、このエンコーダーは、倉庫、工場フロア、または屋外に配備された機器などの埃の多い環境や汚い環境でも精度を維持することができます。磁気技術と同様に、静電容量式エンコーダーは、ギアオイルなどの非導電性の液体に浸すこともできます。これにより、コードホイール筐体の高価なシーリングを節約し、光学エンコーダーを使用するときにしばしば必要とされるディスクの日常的なクリーニングまたは交換の需要を最小限に抑えることができます。同時に、静電容量式エンコーダーは、通常の精度値0.2度で、他のエンコーダー技術と少なくとも同じかそれ以上の精度を提供します。
エネルギー効率に関しては、AMT静電容量式エンコーダーも大きな利点があります。AMT10エンコーダーとAMT10Eエンコーダーは、同等の光学エンコーダーの消費電流の10分の1未満です。これはマルチモーターシステムでは大幅に電力を削減できます。以下の表は、AMT10とAMT10E、そして5Vと6mAの消費電力を、4モータシステムに競合する光エンコーダーと磁気エンコーダーの例と比較しています。
| エンコーダーのモデル | タイプ | 動作電圧 | 最高解像度での電流 | 4モーター・システムの動力 |
|---|---|---|---|---|
| AMT10/10E | 容量性 | 5V | 6mA | 0.12W |
| 競合他社 1 | 光学式 | 5V | 85mA | 1.7W |
| 競合他社 2 | 磁気 | 5V | 160mA | 3.2W |
AMT10シリーズとAMT10Eシリーズ以外では、Same Skyのその他のAMTインクリメンタル、アブソリュート、静電容量式エンコーダーのシリーズは、5Vと16mAでのみ電力を消費します。これは、光学エンコーダーや磁気エンコーダーと比較すると、それでも大幅な電力節約を表します。
容量ベースの回転エンコーダーは、他のオンボードサブシステムのすべてのニーズを満たすために十分な電力を節約するだけでなく、サービス頻度も光エンコーダーより少なくなります。ただし、精度を回復するためにクリーニングが必要になる場合があります。磁気エンコーダーは、耐久性に優れているものの光学式または静電容量式よりも精度が低く、光学エンコーダーのほぼ2倍の電力消費が必要となる可能性があります。
ロボットにさまざまなタスクに対する複数のモーターが搭載されている場合は、光学式または磁気式ローター位置エンコーダーのすべてを容量エンコーダーに置き換えることで、全体の電力予算から節約してGPSモジュール、無線通信、またはセンシングのようなサブシステムを実行することが可能です。これにより、より多くのバッテリーのエネルギーを使用して、車両の動作範囲を拡大することができます。
最後に特筆すべき点として、Same SkyのAMT21AMT22、AMT24シリーズなどのロボット工学における静電容量式アブソリュート・エンコーダーの人気が高まっています。インクリメント・エンコーダーとアブソリュート・エンコーダーの両方を回転シャフトの速度、方向、位置の測定に使用できますが、アブソリュート・エンコーダーには、電源オンを含むシャフト位置をいつでも出力する機能が追加されています。これにより、インクリメント・エンコーダーに必要な原点復帰シーケンスが不要になります。アブソリュート・エンコーダーは、最小のレイテンシーでリアルタイムで真の位置を提供することができ、正確な位置データを必要とする自律型モバイルロボットアプリケーションに最適です。当社のブログ「あなたの設計にアブソリュート・エンコーダーが最適になるとき」では、このトピックをより詳細に概説します。
未来は何を持っているのか。
モバイルロボティクスの普及に伴い、バッテリー駆動動作の必要性が高まっています。市場が発展し、エンドユーザーがますます要求が厳しくなるにつれて、バッテリーエネルギーのミリアンペア/時あたりの価値はますます高まっています。ロボットの長時間作業やフル稼働での長距離移動を可能にするためには、限られた電力予算を慎重に管理することが不可欠です。さらに、効率が向上したことで、エネルギーの無駄が最小限に抑えられるようになり、エンジニアはより小型で軽量なバッテリーを指定することで、動作のさらなる改善とアプリケーションのサイズの縮小を実現できます。
モバイルプラットフォームと空中プラットフォームでは、駆動ホイールまたはローターだけでなく、複数軸でのモーションコントロールを必要とすることが多いさまざまな位置決めメカニズムやアクチュエーターにも、多数の電動モーターを組み込んでいます。モーターの電力消費量は、小さな位置決め機構では数ワットから数十ワット程度、トラクションやリフト用ではかなり多くなることがあります。各モーターには、重要な電力も放散する関連ドライバ/コントローラユニットがあります。各モータシステムで消費される電力を最小限に抑えると、有用な作業のためにより多くのバッテリーエネルギーを解放し、複数のモータにわたる累積効果は、より小さなバッテリーでもっと進むことができるロボットを構築すべく貴重な利点を提供することができます。
小型モバイルロボットや民間ドローンの形での手頃な自動化は、製造、流通、資産管理などの活動に革命を続けています。容量技術を利用した回転エンコーダーは、エキサイティングなモバイルロボットの発展にはさほど貢献しませんが、消費電力の節約を可能にします。さらに、一般的には、これらは、三相誘導モータの効率レベルを定義するEUのIEC 60034-30-1規格など、多くの異なるアプリケーションの生産者が効率規制を満たすのを助けることもできます。しかし、これらの小型でエネルギー効率の良い機器のおかげで、モーター駆動の機器はどこでもこれまで以上に少ない電力でさらに長時間の稼動を実現できます。
 タグ:
タグ:
その他のリソース